
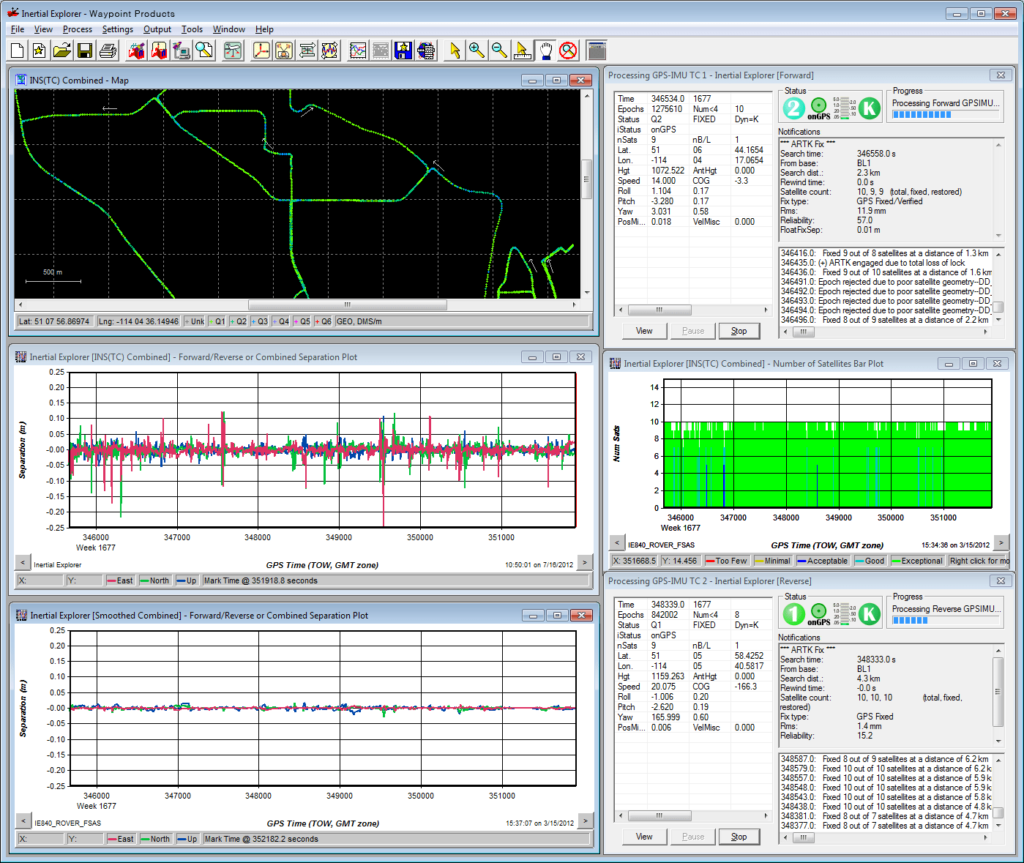
描述
Inertial Explorer通过确保程序视觉的定位,速度和准确性来最大化GNSS / INS硬件性能。即使使用低级惯性传感器,GNSS和IMU数据的强大集成也可以产生准确的结果。Inertial Explorer可以为按需应用程序(如移动制图,航图和水文学)产生良好的效果。IMU数据可以通过使用高级光纤(FOG)或陀螺仪激光环(RLG)的光纤以及低级传感器技术(例如微机电系统(MEMS))进行处理。
该软件具有与您的业务和专业知识相匹配的工作流程。项目向导可用,因此新的GNSS / INS用户可以快速生成。对于更有经验的用户,有许多处理配置选项。自动检测加工环境(航空,陆地,步兵和海洋)可以使GNSS + INS处理设置自动使用,以简化工作流程并减少开始产生高质量结果所需的学习曲线。
Inertial Explorer软件的功能和规格:
- 建立HTML QC报告
- GNSS / INS免费且强大的处理
- 精确点定位(PPP)处理
- 包括用于ASCII导出的灵活向导
- 视轴模块可解决IMU与摄像机框架之间的角度补偿
- 全面支持双频GPS,GLONASS,北斗,伽利略和QZSS
- 直接输出到Google Earth,RIEGL POF / POQ,DXF和SBET格式
- 空中,地面,行人,无人机和近海项目的内部处理配置文件
- 为需要向设备框架输出姿态的用户计算IMU和设备框架之间的距离
- 对L1 + L2(包括E5b,B2I)或L1 + L5(包括E5b,B2a)的定制支持,适用于不同的应用
- 使用EGM2008地面地理模型将姿态校正自动应用于垂直偏差的影响
所需系统
Windows 7 SP1(64位)
Windows 10(64位)
4 GB RAM或更多
图片
您暂时无权访问此隐藏内容!
密码文件(S):密码:www.gopaysoft.com



